Попробую собрать микроскоп, с управлением стола микроконтроллером.
В наличии имелись:
- объектив
- окуляр
- микроконтроллер atmega8a
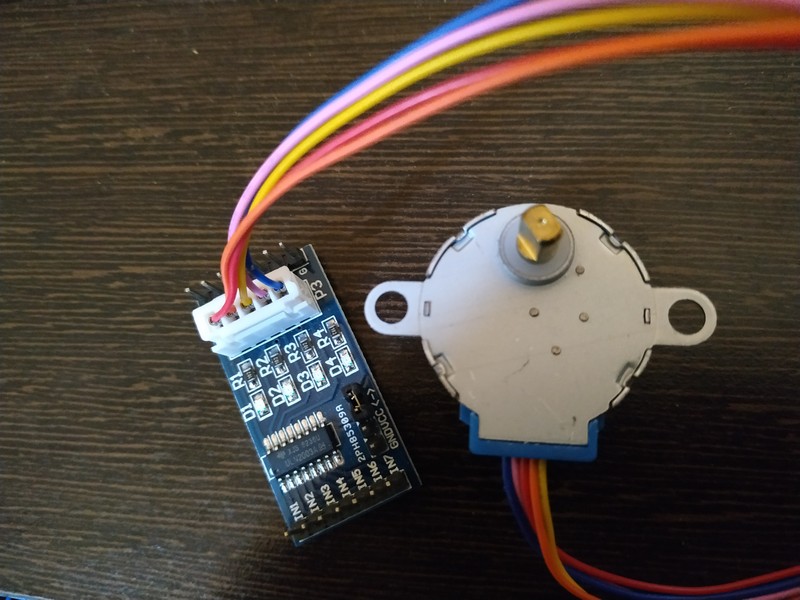
- шаговый двигатель 28YBJ-48
- модуль двигателя шагового двигателя ULN2003 синий текстолит
Микроконтроллер должен управлять подсветкой препаратов, а так же уровнем предметного стола. Для этого и нужны двигатели.

1-й шаг - подготовка
Первым делом экспериментальным путем было подобрано расстояние между объективом и окуляром, чтоб все изображение с объектива попадало в окуляр при минимальных светопотерях. Подобрано расстояние между линзами, собирающими свет от светодиодов и освещающих препарат.
Эти измерения позволили перейти ко второму шагу.
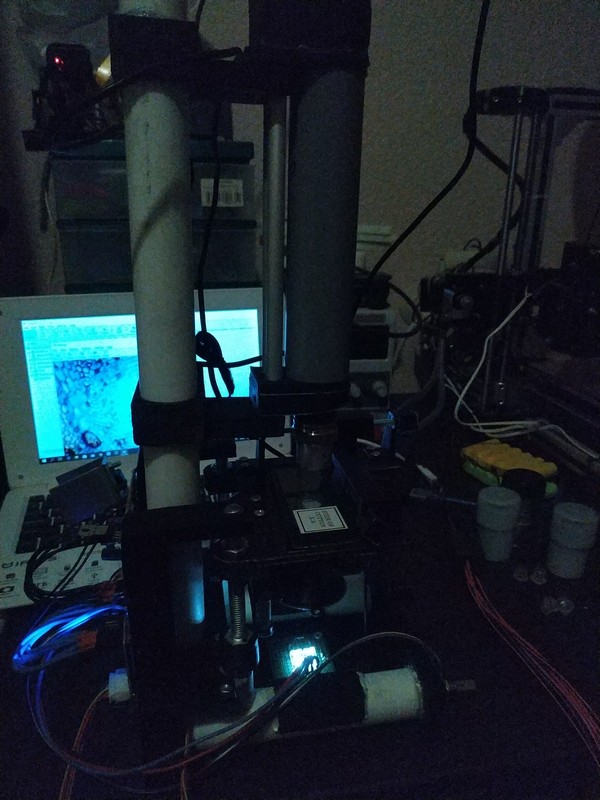
2-й шаг моделирование корпуса
Моделирование происходило во FreeCAD. Подборка по размерам, создание отдельных частей и соединение их воедино. Все соединительные детали этой конструкции из модели были экспортированны в отдельные файлы и распечатаны на 3D принтере.
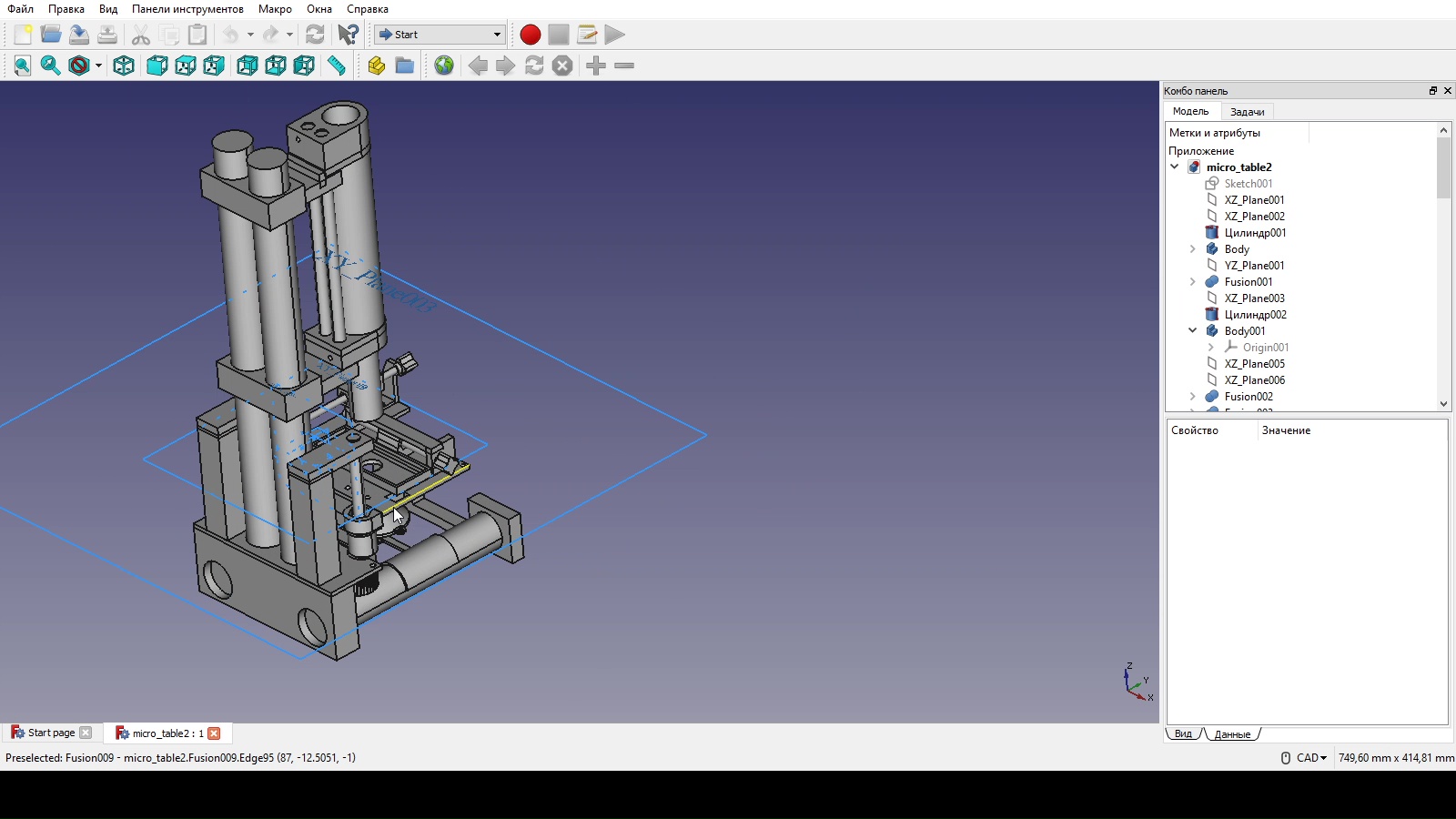
Стол должен передвигаться на гайках по болтам,

которые будут вращаться двигателями.
Не очень удачная идея - т .к. гайки имеют люфт и болты не идеально ровные. Из-за чего позже обнаружится люфт стола и нужно будет уменьшать скорость вращения двигателей.
В качестве подпорок соединителей использовались пластиковые трубы:

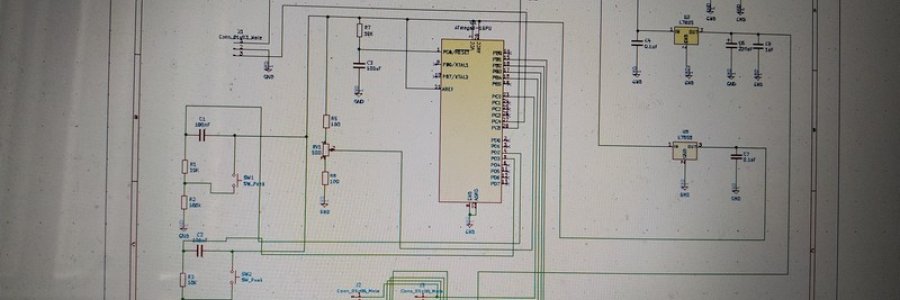
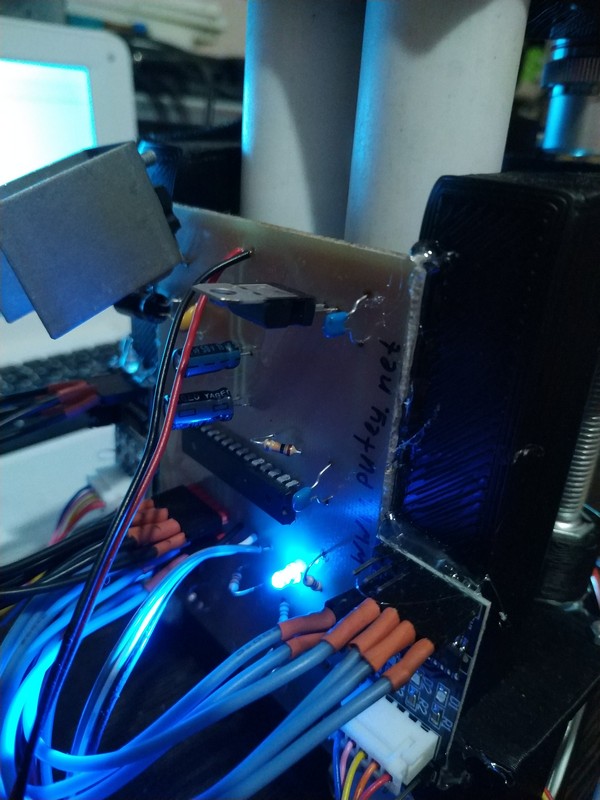
3-й шаг - схема
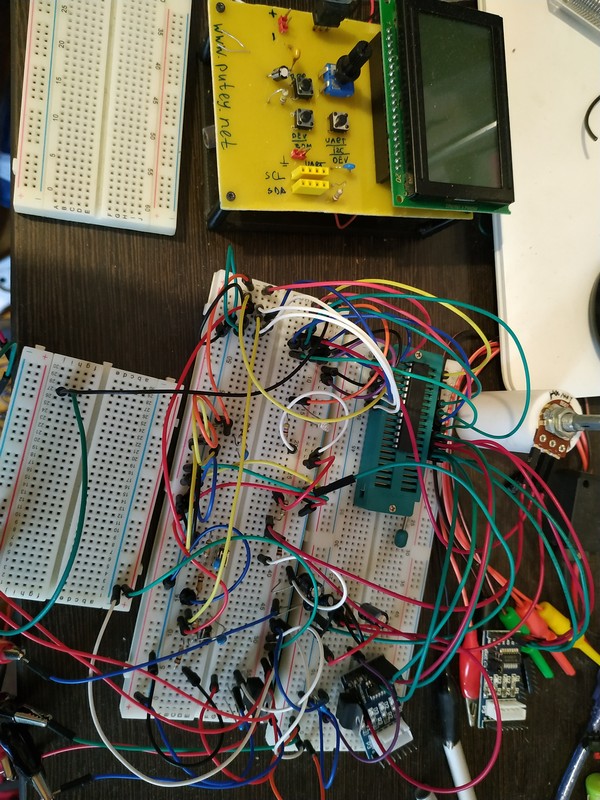
Моделирование схемы происходило на отладочной плате:
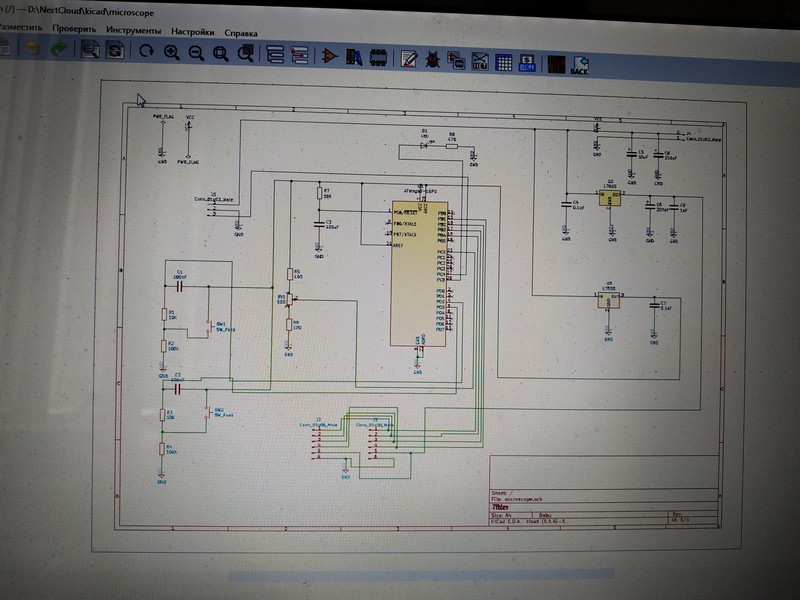
и в KiCAD:
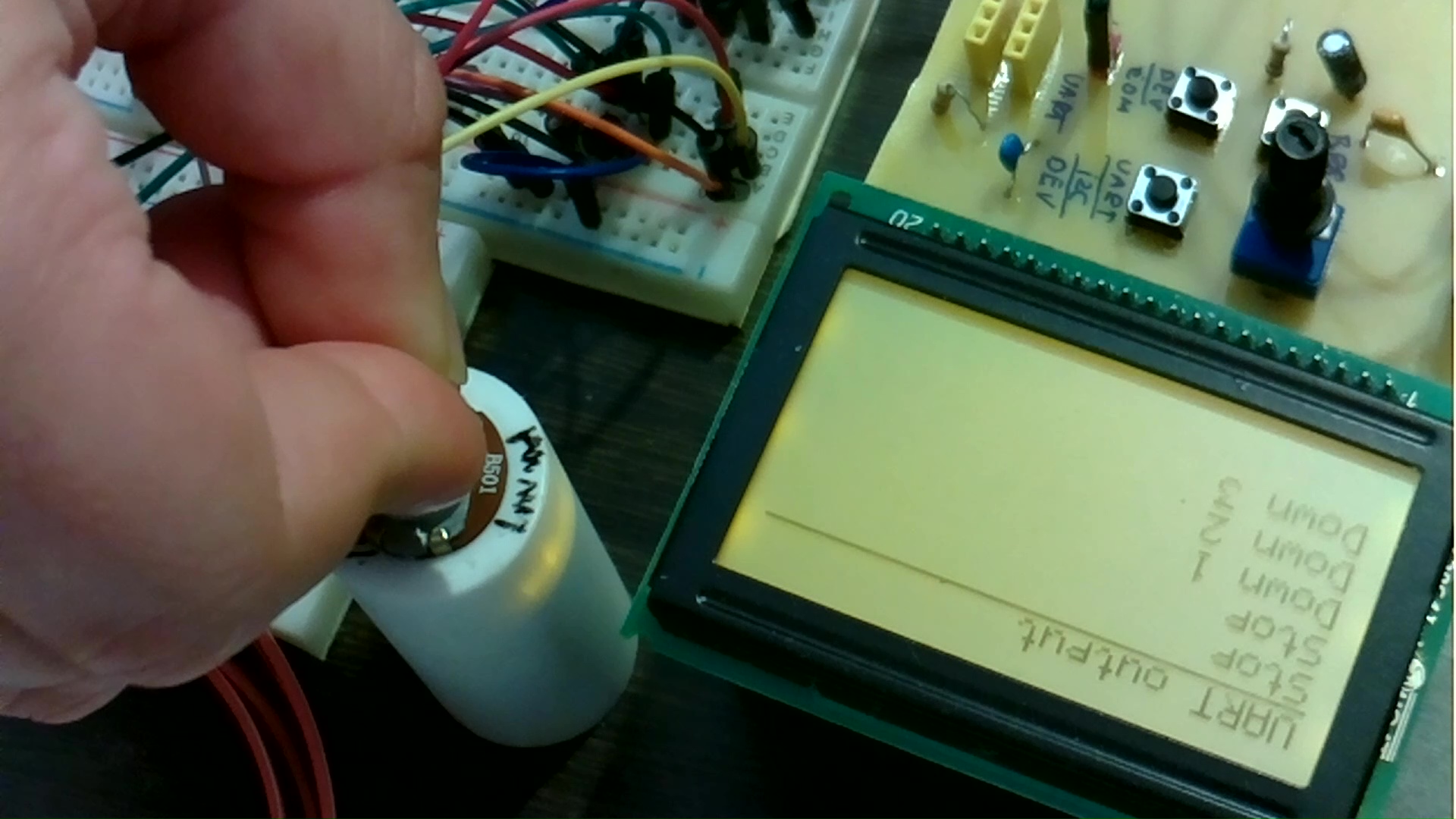
Направление движения задается потенциометром. Когда ручка потенциометра посередине, тодвигатели не должны ращаться. По мере кдаления ручки от центра влево или вправо - скорость вращения двигателей должна увеличиватся.
Увеличение сопротивления потенциометр или уменьшение должно задавать напрваление движения двигателей.
Вначале занчение считываемое микроконтроллером с потенциометра выводилось на отладочный экран по UART (аппарат из статьи)
Обработка кнопок осуществляется по прерыванию. Кнопок всего две: 1 - для включения и отключения подсветки, 2 - принудительное отключение двигателей. Описание механизм обработки по прерыванию можно найти в статье
ссылка на программу микроконтроллера
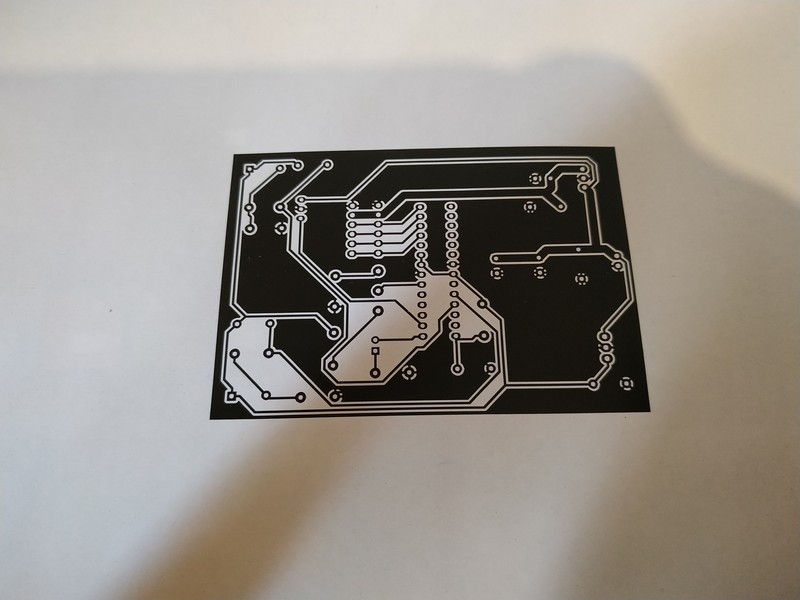
Далее разводка на печатной плате по методу
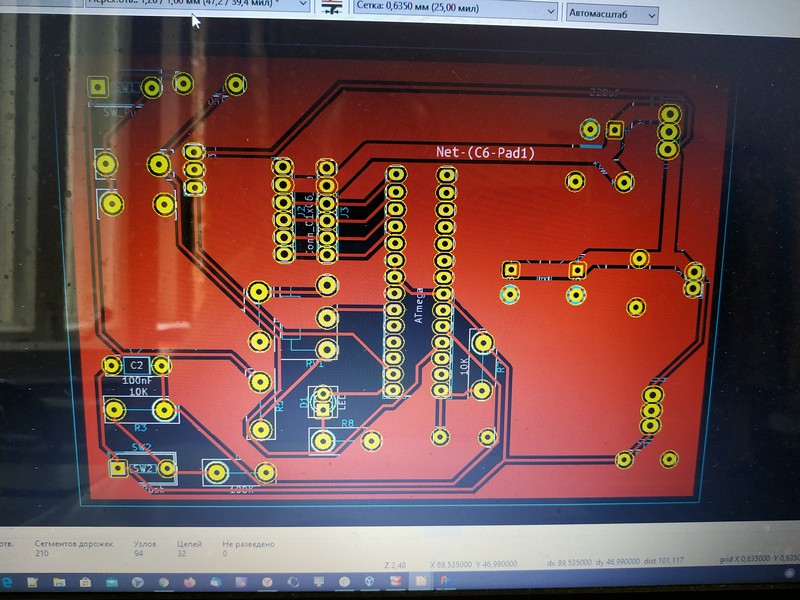
Создание маски и травление по методу ЛУТ:

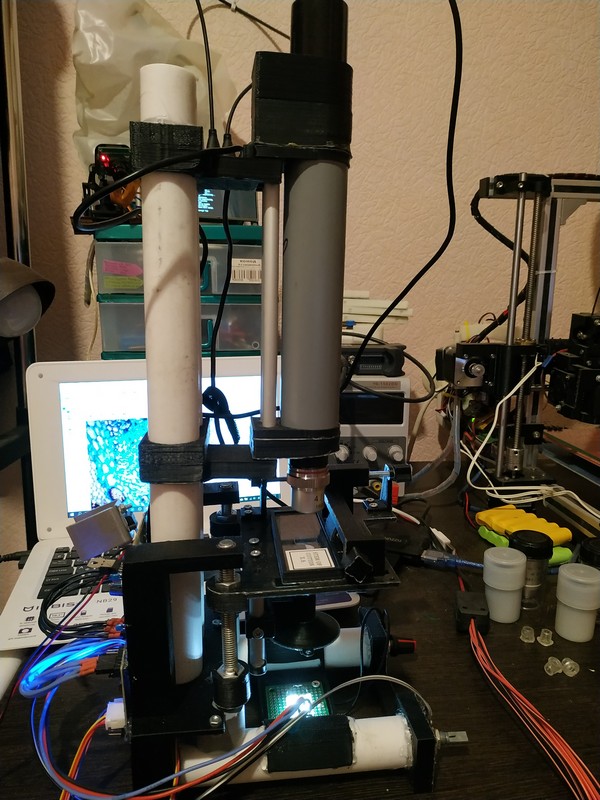
4-й этап - сборка и тестирование
Первая сборка показала, что соединяются составляющие корпуса микроскопа верно.

Но механические части дали большой люфт стола. Пришлось уменьшать скорость вращения двигателей, а также изменить наклон болтов. От люфта избавиться полностью не удалось, в следующий раз с болтов спилю головки, так будет ровнее. Но примелемых для меня рузультатов добиться удалось.
Файлы прокта ссылка Видео:

BayRepo
Обо мне
Связаться со мной: bayrepo.info@gmail.com или a@bayrepo.ru.
Репозиторий с полезными пакетами(по моему мнению):
MSVSphere 9|CentOS 9|Almalinux 9|RockyLinux 9
Другие проекты:
MSVSphere 9|CentOS 9|Almalinux 9|RockyLinux 9
есть самописные программы и библиотеки описанные в блоге и документации, а так же последние версии используемых мною программ.
Отладчики, дизассемблеры, статические анализаторы
Блог удач и неудач. Здесь я выкладываю статьи о начинаниях которые получились и которые не получались.
youtube канал
rutube канал
Список курируемых сайтов: